Developing a control system through the application of rigid logical principles. Designing a control machine by utilizing a logical controller from the PIC family and also considering the use of a logic controller from the PLC “FATEK” family. Planning and implementing an electro-pneumatic scheme for the fundamental operation of a robot-manipulator. This project aims to optimize efficiency, accuracy, and productivity in industrial automation processes.
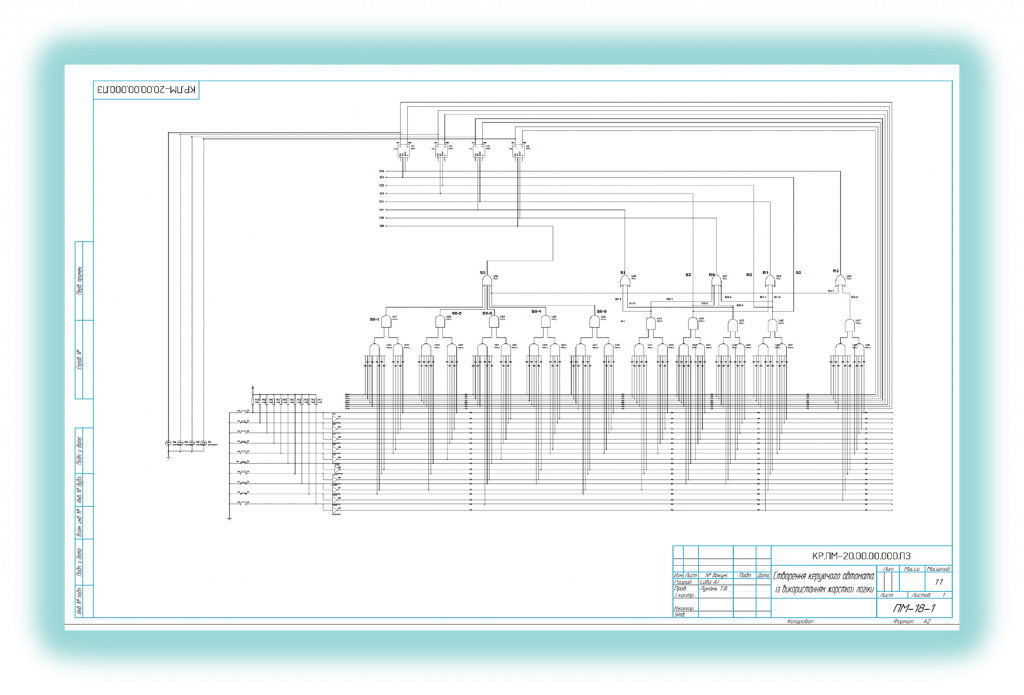
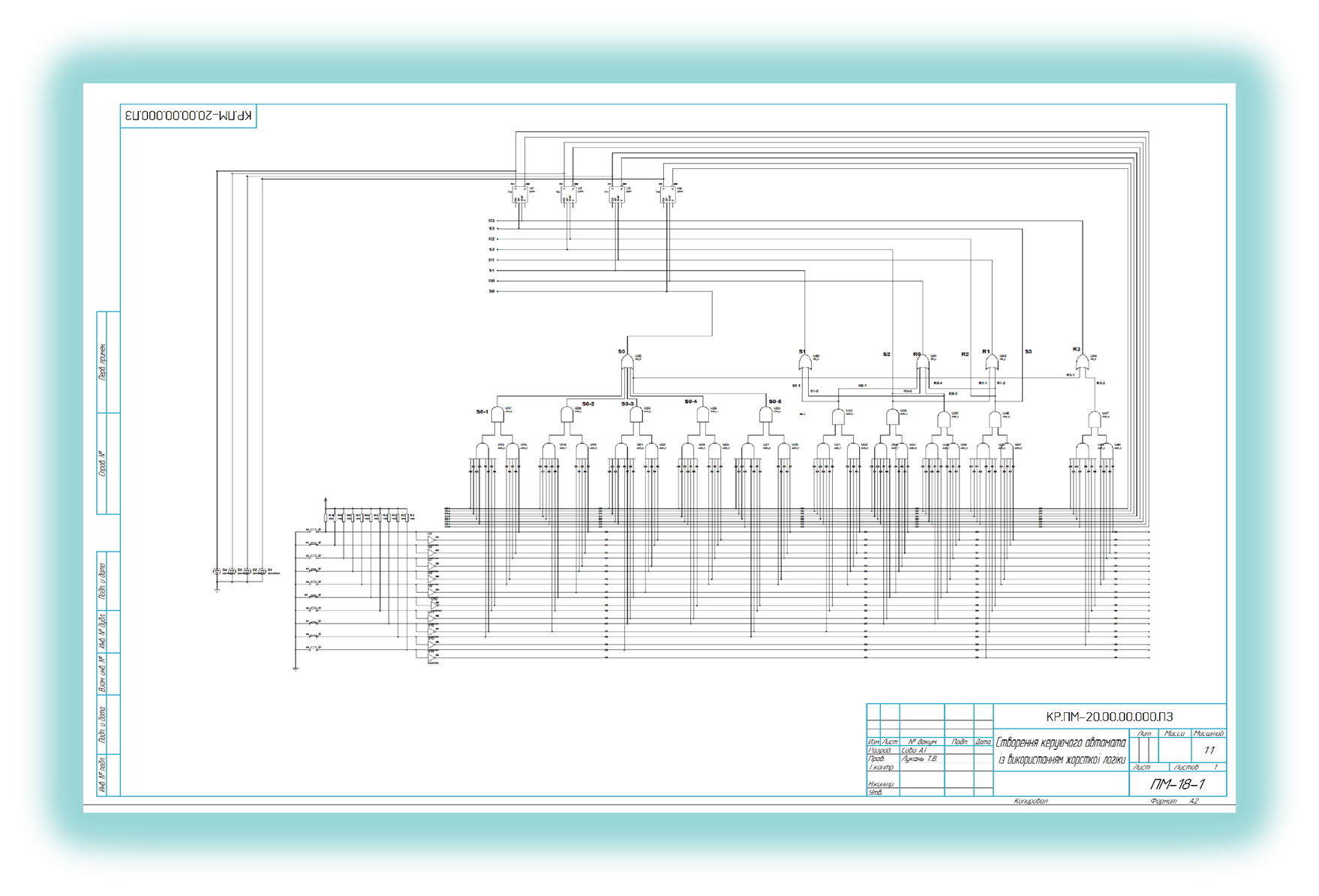
1.Creating a control machine using rigid logic.
2.Creation of a control machine based on the use of a logical controller of the PIC family.
3.Creation of a control machine based on the use of a logic controller of the PLC “FATEK” family.
4.Project of the basic electro-pneumatic scheme of the robot-manipulator.